
Article of the Month - January 2020 |
Edi Meier, Inma Gutiérrez, Marco Baumann, Max Bosshard, Rainer Heeb, Switzerland
 |
 |
 |
| Edi Meier | Inma Gutiérrez | Max Bosshard |
This article in .pdf-format (14 pages)
This paper was presented at the FIG Working Week 2019 in Hanoi, Vietnam. The paper describes how Ground Penetrating Radar is used to document the present underground condition of the water front of the harbour promenade in Arbon (Lake of Constance) in Switzerland. This nondestructive method gives as a result images of the subsurface structures as well as of installations like service pipes.
After a severe winter in Switzerland, two sinkholes opened suddenly on the much used water front of the harbour promenade in Arbon (Lake of Constance), following a time span with intensive wind that brought big waves to the shore. The public building authority is responsible for the safety of the boardwalk. They decided not only to search for further sinkholes but also to document the present underground condition. This will be used for the forthcoming restauration work. In order to get a precise underground documentation of the area a Ground Penetrating Radar (GPR) survey was executed. This nondestructive method gives as a result images of the subsurface structures as well as of installations like service pipes. The underground structure of the port facilities is clearly shown in the radar images (reflectograms). For the city council of Arbon this radar documentation is a helpful tool for the emergency decisions as well as for the planning of the future lakeshore constructions.
The city of Arbon on the Swiss shore of the southern Lake of Constance is famous for the “Summerdays”-festival. The festival activities with openair concerts and temporary funfair installations extend from the fairground plaza along the entire esplanade (Fig. 1).
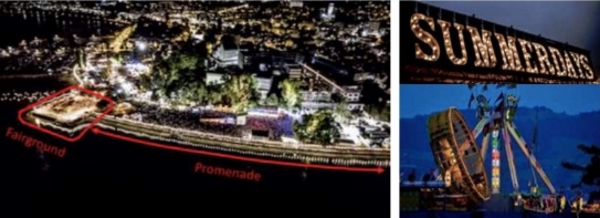
Fig. 1): Summerdays-festival in Arbon, Lake of Constance, Switzerland [3].
During winter 2018 extreme climatic conditions prevailed in the area of the Lake Constance. At the beginning of February the lake water level was higher than the since 1881 measured data (Fig. 2). Driven by a strong north wind big waves lashed to the shore of the promenade. With temperatures below zero the whole area was covered by a dangerous ice shield (Fig. 3 left).
One month later, when the ice melted away, the ground under the fairground plaza and under the pedestrian promenade suddenly collapsed (Fig. 3 right). Only the massive retaining wall did not tumble down and formed a bridge (Fig. 4 left). Apparently, the poor condition of the shore ramp and the high water level - in combination with the strong north wind - was the cause for the soil erosion. The lakewater could penetrate through openings and cracks in the wall (Fig. 4 right) and loosened the ground when freezing.
The city council was worried and assumed more hidden holes in the underground (Bosshard M., 2018). This would be a major risk for the coming "summerdays"-festival.
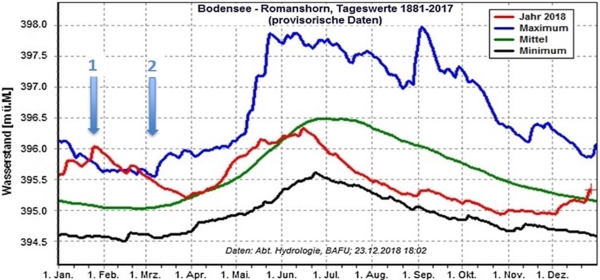
Fig. 2): Water level fluctuation of the Lake Constance since 1881. Red curve = curve for the year 2018, green curve = mean water level, black curve = min. water level, blue curve = max. water level.

Fig. 3): Ice shield on the shore in February (left) [4]. Collapsed ground after the melting of the ice in March 2018 (right).
In March 2018 GPR investigations were carried out. The goal was to detect hidden large holes in the ground that could cave in. At the same time, the city council wanted to get a documentation of the underground conditions for the future shore restoration. The measurements were executed on the pedestrian promenade, the fairground plaza and on two associated shore ramps. Parallel lines were recorded per zone. The "radargrams" represent either a profile in depth or a profile perpendicular to the ramp. Additionally 43 parallel profiles with a spacing grid of 50 cm were executed, that allowed a 3-D analysis of the underground.

Fig. 4): Collapsed site near the promenade (left). Holes between the stones in the ramp (right).
Two areas were investigated: the pedestrian walkway and the fairground plaza, both with associated ramp. The measured data were collected in five parallel rows. During the first measurements, there were still a few icy places on the shore. A GPR system with shielded 250- / 700-MHz double antennas was used (Fig. 5 above).
During the entire series of measurements, the data was collected simultaneously with the 700 MHz antenna as well as with the 250 MHz antenna - in other words - twice. For a detailed analysis of the first three meters depth, the data of the 700 MHz antennas were evaluated. In order to locate deeper objects, the data of the 250 MHz antennas were also analysed. In the upper zone, that is to a depth of three meters and thus close to the surface, “radargrams” with a higher resolution are possible using the 700 MHz antennas.
A week later the two profiles on the shore ramp were executed. For this purpose, two carriages were built, a guiding carriage for the quay wall and a carriage for the ramp wall. They were fixed together with a rope-system.
In the meantime the ice had melted away, but the sloping shore was still very slippery. Because of the high waves and heavy rain, the field work was done wearing a dry suit.
The guiding carriage was equipped with a precision trigger wheel. This released a measurement every 5 cm interval. The carriage with the radar antenna on the ramp wall was pulled with the same speed as the guiding carriage. Thus, the metering of the ramp profiles is always comparable to that of the profile F1 on the quay wall.
The surface of the stones on the ramp wall was relatively uneven and some obstacles had to be overcome. Because of the widely supported suspension of the radar antenna, these obstacles gave less error signals in the reflectograms than expected.

Fig. 5): GPR shots along the promenade: Three profiles on top of the path, view towards the fairground plaza (top picture), two profiles on the ramp wall, view in the opposite direction (pictures below).
A radar pulse is emitted from the transmission antenna into the ground, which is reflected at interfaces of rock packages or layers in the underground (Fig. 6). Thereafter, the pulse returns to the receiving antenna where it is recorded. The time that elapsed between transmission and reception of the pulse provides information about the depth of the object (reflector). The strength of a reflection serves as a clue to the electrical properties of the material that caused the reflection.
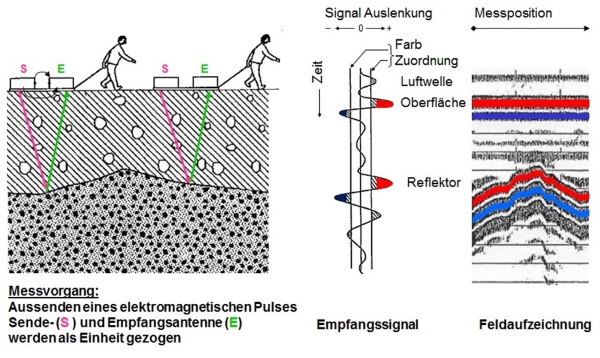
Fig. 6): Principle of GPR measurement (Meier E. et al., 2002)
A measurement is always recorded as a profile. To do this, the echoes of the transmitted radar pulses are recorded point by point along a line (profile line). The reflection pattern is used to interpret the condition of the subsoil. The resolution of the achieved GPR mapping structures depends on the antenna frequency and the scan rate along the profile line.
2.4 Datapresentation and Dataanalysis
On top of the “radargrams” the length scale is given in meters, on the left the signal propagation time in nanoseconds and on the right the depth scale in meters. The depth specification is calculated from the signal propagation time and the signal speed. The value of the depth specification is only to be regarded as a guideline value. The zero point of the vertical axes corresponds to the terrain surface.
The “radargrams” are checked for conspicuous structures, that is diffraction patterns, so-called hyperbolas. They are caused by locally limited strong reflectors such as pipes, manholes, cavities, etc. In addition, linear structures are analysed, that can provide information on geological stratifications in the underground. In order to specify the depth of located objects or structures, the knowledge of the propagation velocity of radar waves is necessary. For this purpose a guideline value of v = 0.1 m/ns has been used in the “radargrams”. For an exact depth specification, the depth scale would have to be calibrated with the location of known pipes etc. or with data from drilling holes.
The “radargrams” recorded on the pedestrian path show clear structures up to about 4 m depth. Profile F3 was taken at a distance of 2 meters parallel to the quay wall. Figures 7 and 8 show the same section as profile F3, but were recorded with two different frequencies. While the 700 MHz antenna shows smaller structures (Fig. 7), the 250 MHz antenna achieves greater depth penetration (Fig. 8).
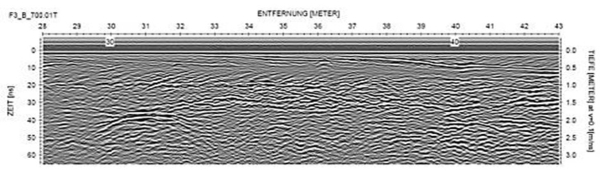
Fig. 7): Part of profile F3, taken with the 700 MHz antenna.
On both pictures is the same structure clearly visible: a structure up to 1 m depth, that slopes to the left, is seen on the left half on the “radargram” as well as the departure tracks of the construction machines on the right half.
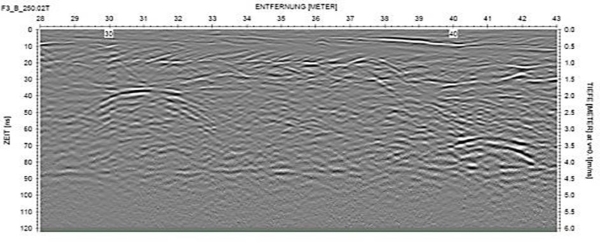
Fig. 8): Part of profile F3, taken with the 250 MHz antenna.
When interpreting these images, it must be ensured that they are not to be regarded as a direct image of the underground. For example, a highly reflective object can not only be seen vertically below the radar antenna, but it is already recorded from an oblique angle from the receiving antenna. In the “radargram” it is displayed perpendicular to the profile. This leads to the above-mentioned “bow shape” (hyperbolas). This can be seen on the “radargram” of profile F1 taken on the Quai wall: there is a regular pattern of hyperbolas (Fig.9). Four transverse reinforcing bars per meter create this pattern. The hyperbolas in the “radargram” simulate a continuous arcuate support structure, that certainly does not correspond to the reality. In fact, the “reinforcing bars” are likely to be only a few cm in width.
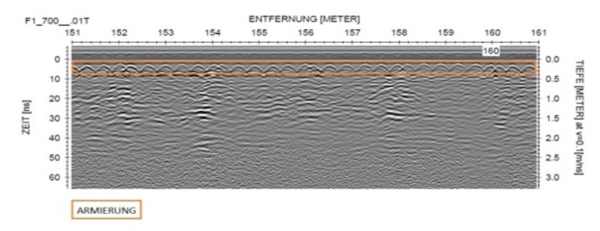
Fig. 9) Part of profile F1 on the quay wall, taken with 700 MHz antenna. Reinforcing bars draw hyperbolas in the “radargram”. At the apex of each hyperbola is a “reinforcing bar” in transverse direction to the profile.
To correct these "artefacts" the geophysical processing method "migration" is used. This method recalculates the hyperbola branches to a circle, the actual origin of this object. However, migration only makes sense if the hyperbolas cover underlying structures or if steep structures are present. We recommend to keep the hyperbolas in the “radargram” and to analyse them. The position and depth of the object can be determined just as well without migration, because the objects are always at the vertex of the hyperbola.
In addition to cavities large stones or rubble can produce comparable hyperbolas, as both air and stones have a different electrical conductivity from the surrounding material. It is a fact, that the electrical conductivity of the ground changes greatly at the apex of a hyperbola.
The depth and size of an object detected in the “radargrams” can be determined with a model calculation. For this purpose, a reflection hyperbola is calculated and placed over the “radargram”. The shape of the hyperbola is calculated from the “travelled” distance, the diameter of the object and the mean velocity of the radar waves in the overlying rock layer. In addition, the hyperbola shape is influenced by the angle at which an object is cut. In our analysis we used in all “radargrams” for the conversion of the run-time in depth the value of 0.1 m/ns. Depending on the material that lies above the object, this depth conversion must be adjusted.
As an example, the analysis of the object in 2 m depth at profile position 31 m in the radar profile F3 is shown in Fig.10.
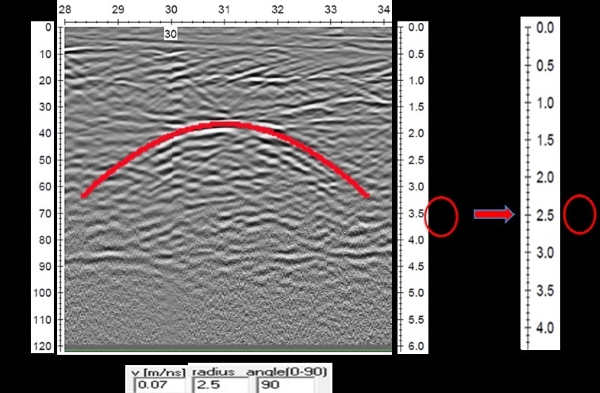
Fig. 10): Model hyperbola adapted to the object in Fig. 8. The depth scale on the right corresponds to the calculated speed of 0.07 m/ns adapted in the model.
The model hyperbola gives a speed of 0.07 m/ns. The depth scale must therefore be corrected at this point by a factor of 0.7. This slower speed indicates that clayey material has been deposited over the object. The model calculation of the value of the diameter of the object gave a result of 2.5 m. However, it could also be an elongated object (pipe) cut at a shallow angle. This would result in a comparable flat model hyperbola. Since the object is not seen in the neighbouring profiles, this interpretation is much more likely. A cavity washed out by the lake can thus be excluded.
2.6 Analysis of the 3-D measurements on the fairground plaza
The 50cm line grid recorded on the fairground plaza allows both a 3-D interpolation of the ground in the longitudinal and transverse directions as well as a plane representation with depth (see Fig. 11). These pictures are “put together” in the form of a film document. It can be played on any video player program and stopped at any depth. In the plane view, in 1.1 m depth, lines (=pipes) can be seen, which are shown as a “Y-shape”. At a depth of 2 meters you can see a dense track in the middle of the area and at the margin a deposit of landfill material is assumed, because all the area is artificially filled up. On the basis of these findings, dredging slits were executed to corroborate the interpretation.
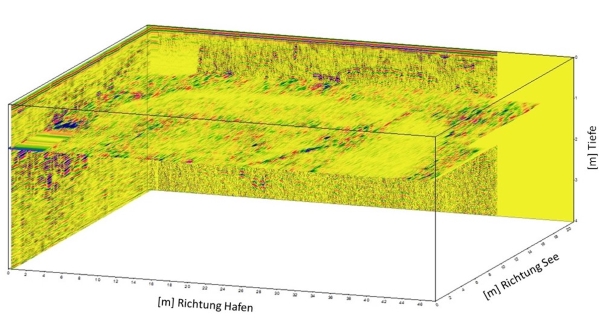
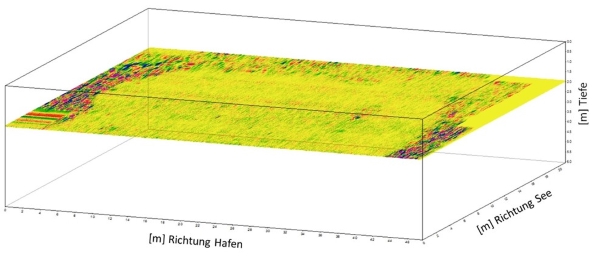
Fig. 11): 3-D images: In the plane view, lines are visible as a „Y-shape“ in 1.1 m depth. The lower picture shows the level at a depth of 2 m. Here, especially on the left and right side of the area, there are highly reflective zones.
The dredging slits to the left and right of the site did not show the expected clayey landfill material. At first a large block of stone appeared, which caused the hyperbola (Fig. 12, left and center). Below the stone there followed potato-sized, round stones without finely granulated material. Water immediately flowed through the large cavities between the stones, (Fig. 12, right), which explains the change in the reflection signals at a depth of 2 meters. This shows that there is a rapid hydraulic connection to the lake water on the edge of the plaza and that a lot of fine grained material from the original fill is washed out. With great certainty it could be ruled out that the ground on the plaza would suddenly collapse. At the most, slow subsidence can occur when more fine grained material is washed out.
 |
 |
 |
Fig. 12): The Profile C7 has a distinct hyperbola (picture left). The excavation brings out a large stone block (middle picture). The remaining excavated material consists of round stones of 3 - 5 cm diameter with little finely granulated material. The water flows immediately (picture right).
With the GPR method, the soil can be quickly “x-rayed”. However, the interpretation is not always clear, as not the strength but the electrical properties of the subsurface is shown. On the one hand, both, air and large, dry stones will produce similar images. On the other hand, water that penetrates into cavities can greatly modify the image. Thus, even after 30 years of experience with GPR, we cannot rule out misinterpretations.
Probing with a dredge slit or with drill-holes has the advantage of visually identifying the layer sequence at a particular location. But using the GPR method will in short time and without destruction help you to determine over the whole survey area, where you want to drill or where to open up a dredge slit.
[1] Bosshard M., June 2018, Sanierung Ufermauer Arbon, unpublished Protokoll Nr., Projekt Nr. 3100-0761, Arbon, Wälli Ingenieure
[2] Meier E., Staubli P., Müller B. U., Stünzi J., Schubert E., Dubois D., Juli 2002, „Georadar - der zerstörungsfreie Blick in den Untergrund: Beispiel aus dem Naturschutzgebiet Zigermoss, Unterägeri/ZG und der Deponie Riet Winterthur/ZH“, Bulletin für angewandte Geologie, Volume 7, Nr. 1, S. 31-44, Winterthur.
[3] Photo “Summerdays Arbon” https://www.summerdays.ch/galerien/208/
[4] Photo “Eiswinter Arbon” http://www.arbon-online.ch/eiswinter2012/IMG_5623.html
Edi Meier is currently the managing director of the engineering company Edi Meier + Partner AG, Winterthur, Switzerland. He studied Geophysics at the Swiss Federal Institut of Technology, ETH Zurich. Subsequently he worked as a manufacturer of seismic instruments (Streckeisen Switzerland) for six years and founded his own engineering company in 1987. His company is specialized in development and construction of precision deformation measuring systems and in geophysical services using Geoelectric and Georadar (GPR) tools.
Inma Gutiérrez is a geologist and is currently working at the engineering company Edi Meier + Partner AG, Winterthur, Switzerland. She studied Geology at the University of Granada (Spain) and completed a complementary Master in “Integrated water management” at the University of Cádiz (Spain). After some experiences in the geotechnical and water management branches, she is working since 2017 in the geophysical branch, specializing in GPR.
Marco Baumann is currently working as a Senior Expert in the Section Water Resources, Office for the Environment OEN, Canton TG, in Frauenfeld, Switzerland. After his Ph.D. Thesis in 1986 at the Geological Institute, Swiss Federal Institut of Technology, ETH Zürich, he worked in various engineering companies as a Geotechnical and Scientific Consultant and Projectmanager and as a Geologist, Hydrogeologist, Projectmanager and Senior Consultat in a geology company. Since 1st August 1994 he is working in the Office for the Environment OEN, Canton TG. First as head of section Water Resources with the topics of integral water management, hydrological data, water protection and water use and since 1st January 2015 with the added topics of Natural hazards, flood protection, river engineering and as expert in the competence center for use of geothermal energy.
Max Bosshard studied civil engineering. After graduating he worked as a research assistant at the Research Institute for Hydraulic Engineering, Hydrology and Glaciology at the Swiss Federal Institut of Technology, ETH Zurich. Subsequently, he joined as project engineer some engineering companies in the Zurich area und worked in the fields of tunneling, railway construction and hydraulic engineering. Currently he is working at Wälli AG Ingenieure, Arbon, Switzerland. His specialties at Wälli AG are constructions on the lake shore and in the lake, such as port facilities, pipelines, footbridges and quay moorings as well as river engineering and revitalization.
Rainer Heeb is a civil engineer FH. He completed a postgraduate degree in business administration. Currently he is the deputy head of the construction department of the city of Arbon, Switzerland, and head of the civil engineering department.
Edi Meier
Edi Meier + Partner AG
SWITZERLAND
Website: www.emp-winterthur.ch
Inma Gutiérrez
Edi Meier + Partner AG
Website: www.emp-winterthur.ch
Marco Baumann
Kanton Thurgau
Office fort he Environment
Website: www.umwelt.tg.ch
Max Bosshard
Wälli AG Ingenieure
Website: www.waelli.ch
Rainer Heeb
Stadt Arbon
Website: www.arbon.ch